- Home
- 新製品&新技術NOW
- ベステラ:点群3D Map利用ロボット開発で一歩前進
ベステラ:点群3D Map利用ロボット開発で一歩前進
- 2016/6/10 15:39
- 新製品&新技術NOW
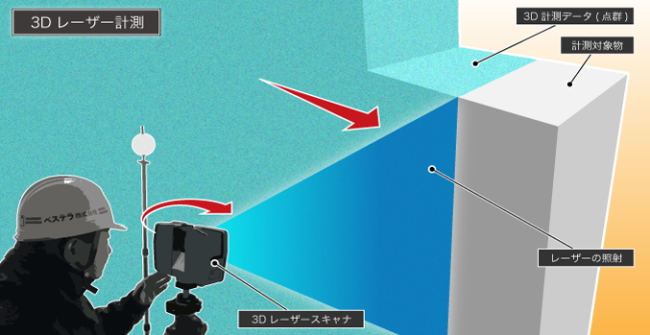
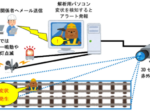
図=3Dレーザー計測
■京都・山口両大学、国際レスキューシステム研究機構と共同研究開始
ベステラ<1433>(東マ・100株)は9日の取引終了後、京都大学、山口大学および、特定非営利活動法人国際レスキューシステム研究機構と、それぞれ「点群3D Map利用ロボット開発」を研究課題とした共同研究契約を結んだと発表した。
共同研究では、同社が開発した3Dレーザー計測技術をロボットの自律制御に生かし、近い将来必要とされる幅広い構築物の解体作業の無人化、点群Mapを基に自律動作するロボットの開発をめざしており、高い専門性を持つ研究機関との共同開発を決めた。
共同研究では、山口大学(同大学大学院創成科学研究科 知能情報工学分野水上嘉樹准教授)がロボットの目に当たる視覚センサから得られた空間情報と3D点群の比較照合について研究し、京都大学(同大学大学院工学研究科機械理工学専攻松野文俊教授)が点群Mapによる自律作動するロボット技術の開発、さらに国際レスキューシステム研究機構は実験用プラットフォームの提供を担当する。
契約期間は来年3月31日までとしたが開発全体は3ヶ年を予定している。
同社は、「中期経営計画2018」で3D解体の推進を進め、より高度な原子力発電所の廃炉・解体作業等の現場で完全自立制御型ロボットをも視野に入れている。この研究成果を基に、自律作動ロボットでの自動プラント監視や自動施工、原子力発電所の解体への活用も視野に、同社事業への寄与を期待している。
関連記事



ピックアップ記事
-

2026/1/22
KDDI、大阪堺データセンター始動、高性能GPUで国産AI基盤強化■シャープ堺工場跡地を再活用、水冷技術と再エネ電力で高性能計算を実現 KDDI<9433>(東証… -

2026/1/20
『映画 冬のソナタ 日本特別版』世界初公開、韓流の原点が銀幕に帰還■2026年3月6日全国公開、日本の観客へ感謝を込めた特別版 ギャガは、『映画 冬のソナタ 日本… -

2026/1/20
【食卓への第一歩を彩る一冊】『たべもの555』が示す食育図鑑の進化■写真555点で広がる味覚の世界、0歳からの「はらぺこ図鑑」 学研ホールディングス<9470>(…