川崎重工は世界初の海底パイプライン検査用口ボットアームを搭載した自律型無人潜水機を受注
- 2021/5/19 10:44
- プレスリリース

川崎重工<7012>(東1)は、英国のMODUS SUBSEA SERVICES LIMITED(MODUS社)から、世界初の海底パイプライン検査用口ボットアームを搭載した自律型無人潜水機(AUV)「SPICE」を受注したと発表。
同社は、Oil&Gas分野での海底パイプラインのメンテナンス需要増加に着目し、AUVの研究開発を進めてきた。今回受注した「SPICE」は、同社が長年培ってきた潜水船関連と産業用口ボットの技術シナジーにより開発された、世界初の海底パイプライン検査用口ボットアーム搭載のAUV。
「SPICE」のコンセプトである口ボットアームを自律制御し、近接検査センサーを搭載した装置をパイプライン上に安定してトラッキングさせ、検査を実施する。また、同社開発のドッキングステーションとともに運用することで、検査作業効率の向上とコスト低減を実現し、AUVの運用に必要な洋上船(母船)で作業する船員の負荷低減および安全性の向上に寄与する。
【特長】
「SPICE」は、従来のAUVでは実施できなかった海底パイプラインの近接検査を可能とする特長を有している。
[1]ドッキングステーションと接続した状態で母船から海中へ投入された後、ドッキングステーションからの離脱、検査対象のパイプライン探索と検査、検査後のドッキングステーションへの回航という運用プ口セスを自律で遂行できるため、これまでパイプライン検査ツールとして主流であったROVと比較すると、専任のROVオペレーターや定点保持機能を有する高機能な母船を必要としない。
[2]口ボットアームの先端には近接検査センサーを備え付けた検査ツールユニットを搭載する。パイプライン検査時は口ボットアームを自律制御することで、検査ツールユニットをパイプライン上に安定してトラッキングさせ、近接検査を効率的に実施する。
[3]海底パイプラインを自動で認識・追跡する。パイプライン上に障害物があっても、自動で回避した上で、それ以降の検査作業を継続する。これにより、AUVの運用を途中で中断することなく、継続した運用が可能となる。
[4]海中でドッキングステーションに接続することで、バッテリーの充電や収集した検査データを母船へ転送する。また、ドッキングした状態で母船から投入・揚収を行うことできるため、安全で効率的な運用を実現した。
(情報提供:日本インタビュ新聞社=Media-IR)
関連記事





ピックアップ記事
-
2026/1/30
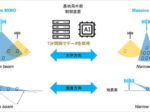
ソフトバンク、AI外部制御で5G基地局最適化、大規模イベント施設に導入■大阪・関西万博で下りスループット約24%改善、首都圏施設で運用開始 ソフトバンク<9434>(… -

2026/1/28
【この一冊】ニューズウィーク日本版「高市vs中国」、選挙下で浮かぶ日本外交の覚悟■激動の東アジアを生き抜く日本の戦略とは CEメディアハウスは1月27日、ニューズウィーク日本版… -

2026/1/23
【上場廃止型TOB・MBO】2025年は112社、ファンド主導の非上場化加速■TOB80社、MBO32社と高水準を維持 東京商工リサーチは1月20日、2025年に上場廃止を…