三菱重工業はプラント巡回点検防爆ロボット「EX ROVR」第二世代機の開発を完了
- 2022/4/11 17:08
- プレスリリース
■“ASCENT”の製品名で4月から市場投入へ
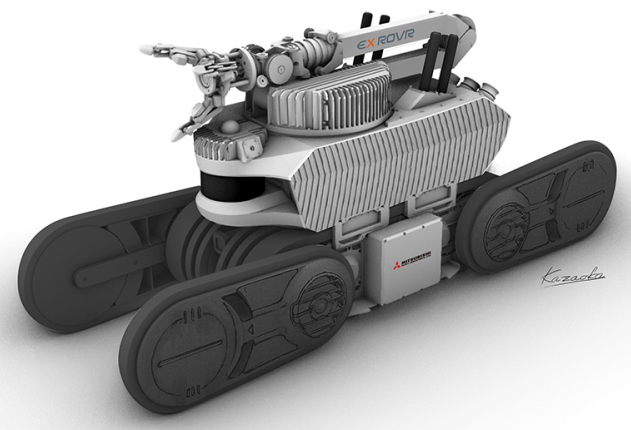
三菱重工業<7011>(東証プライム)は4月11日、防爆性能(引火性ガスが充満する環境下において機器自体が発する電気火花や熱などによる爆発や火災の危険性を抑える性能)を有するプラント巡回点検防爆ロボット「EX ROVR(エクス ローバー)」の実用化に向けた第二世代機について、ENEOSとの共同開発を完了したと発表した。
EX ROVRは原子力発電所向けの遠隔保守技術をベースとして開発したものであり、防爆型式検定の合格、マニピュレーターの実装、ソフトウェアの開発、初号機での実証試験を完了して実用化を果たし、4月から“ASCENT(アセント)”の製品名で市場投入を開始する。
■効率的なプラント点検とデータの有効活用、安全かつ迅速なインシデント収束に貢献
今回開発を完了した初号機は、2022年度からENEOSのサイトにて試運用を予定しており、ロボットの長期運用や点検作業状況に関するデータの蓄積を進めていく。また、蓄積した点検データの有効活用により、異常兆候を早期に把握可能とする判定アプリ開発を進め、さらなる製品価値の向上に努めていく。
EX ROVRは、爆発性雰囲気となり得る状況下において昼夜を問わず点検作業を行い、作業員の安全性向上、業務効率化および設備稼働率の向上に貢献していく。国際規格であるIECEx、欧州をはじめ世界で広く採用されているATEXおよび国内の防爆型式検定に合格済みであり、可燃性ガスのある危険場所(Zone1)において安全に使用することが可能。
また、照明付きカメラを搭載した6自由度防爆マニピュレーターの採用により、プラント内計器の複雑な配置に応じたさまざまな姿勢で近接・正対画像を撮影できるほか、ガス濃度の測定や音声の録音、熱画像の取得も可能。さらに付属のウェブアプリと組み合わせて活用することで、遠く離れた場所からでも点検スケジュールの運用管理や点検データの確認を行えるほか、プラントにおけるインシデント発生時には遠隔操作によりタイムリーな現場確認が可能で、プラント点検業務の効率化と安全かつ迅速な事態収束に貢献していく。(情報提供:日本インタビュ新聞社・株式投資情報編集部)
関連記事




ピックアップ記事
-
2024/10/5
株は千里を行って千里を帰る=犬丸正寛の相場格言【先人の教えを格言で解説!】 (犬丸正寛=株式評論家・平成28年:2016年)没・享年72歳。生前に… -

2024/10/4
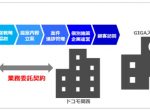
人手不足倒産が過去最多を更新!深刻化する人材不足、賃上げに向けた課題も■2024年度上半期163件で過去最多更新 人手不足による倒産が急増している。帝国データバンクの… -

2024/10/3
トヨタ、空飛ぶクルマ実現へJoby Aviationに5億ドル追加出資■新たなモビリティ社会実現に向けた取り組み加速 トヨタ自動車<7203>(東証プライム)は10月…